Neural Computing, e.g. Artificial Neural Networks, is one of the most interesting and rapidly growing areas of research, attracting researchers from a wide variety of scientific disciplines. Starting from the basics, Neural Computing covers all the major approaches, putting each in perspective in terms of their capabilities, advantages, and disadvantages.
An Artificial Neural Network (ANN) is an information processing paradigm that is inspired by the way of biological nervous systems, such as the brain, process information. The key element of this paradigm is the structure of the information processing system. It is composed of a large number of highly interconnected processing elements (neurones) working in unison to solve specific problems. ANNs, like people, learn by example. An ANN is configured for a specific application, such as pattern recognition or data classification, through a learning process. Learning in biological systems involves adjustments to the synaptic connections that exist between the neurones. This is true of ANNs as well.
4.1 The brain as an information processing system
The human brain contains about 10 billion nerve cells, or neurons. On average, each neuron is connected to other neurons through about 10 000 synapses. (The actual figures vary greatly, depending on the local neuroanatomy.) The brain's network of neurons forms a massively parallel information processing system. This contrasts with conventional computers in which a single processor executes a single series of instructions.

Against this, consider the time taken for each elementary operation: neurons typically operate at a maximum rate of about 100 Hz, while a conventional CPU carries out several hundred million machine leveloperations per second. Despite of being built with very slow hardware, the brain has quite remarkable capabilities:
- Its performance tends to degrade gracefully underpartial damage. In contrast, most programs and engineered systems are brittle: if you remove some arbitrary parts, very likely the whole will cease to function.
- It can learn (reorganize itself) from experience.
- This means that partial recovery from damage is possible if healthy units can learn to take over the functions previously carried out by the damaged areas.
- It performs massively parallel computations extremely efficiently. For example, complex visual perception occurs withinless than 100 ms, that is, 10 processing steps!
As a discipline of Artificial Intelligence, Neural Networks attempt to bring computers a little closer to the brain's capabilities by imitating certain aspects of information processing in the brain, in a highly simplified way. The comparison of computer and brainabilities is shown in Table 5.
The brain is not homogeneous. At the largestanatomical scale, wedistinguish cortex, midbrain, brainstem, and cerebellum. Each of these can be hierarchically subdivided into many regions, and areas within each region, either according to the anatomical structure of the neural networks within it, or according to the function performed by them. The overall pattern of projections (bundles of neural connections) between areas is extremely complex, and only partially known. The best mapped (and largest) system in the human brain is the visual system, where the first 10 or 11 processing stages have been identified. We distinguish feed forward projections that go from earlier processing stages (near the sensory input) to later ones (near the motor output), from feedback connections that go in the opposite direction. In addition to these long-range connections, neurons also link up with many thousands of their neighbours. In this way they form very dense, complex local networks.
The basic computational unit in the nervous system is the nerve cell, or neuron. A biological neuron has, see Figure 01:
- Dendrites (inputs) a neuron
- Cell body
- Axon (output)

Figure 01
A neuron receives input from other neurons (typically many thousands). Inputs sum (approximately). Once input exceeds a critical level, the neuron discharges a spike - an electrical pulse that travels from the body, down the axon, to the next neuron(s) (or other receptors). This spiking event is also called depolarization, and is followed by a refractory period, during which the neuron is unable to fire.
The axon endings (Output Zone) almost touch the dendrites or cell body of the next neuron. Transmission of an electrical signal from one neuron to the next is effected by neurotransmittors, chemicals which are released from the first neuron and which bind to receptors in the second. This link is called a synapse. The extent to which the signal from one neuron is passed on to the next depends on many factors, e.g. the amount of neurotransmittors available, the number and arrangement of receptors, amount of neurotransmittors reabsorbed, etc.
Brains learn. From what we know of neuronal structures, one way brains learn is by altering the strengths of connections between neurons, and by adding or deleting connections between neurons. Furthermore, they learn "on-line, based on experience, and typically without the benefit of a benevolent teacher. The efficacy of a synapse can change as a result of experience, providing both memory and learning through long-term potentiation. One way this happens is through release of more neurotransmitters. Many other changes may also be involved, see Figure 02.

4.2 introduction to neural networks
An artificial neural network is a connectionist massively parallel system, inspired by the human neural system. Its units, neurons (Figure 63), are interconnected by connections called synapse. Each neuron, as the main computational unit, performs only a very simple operation: it sums its weighted inputs and applies a certain activation function on the sum. Such a value then represents the output of the neuron. Howevergreat such a simplificationis (according to the biological neuron), it has been found as plausible enough and is successfully used in many types of ANN, (Fausett 1994).
A neuron X, obtains input signals x, and relevant weights of connections we optionally a value called bias b, is added in order to shift the sum relative to the origin. The weighted sum of inputs is computed and the bias is added so that we obtain a value called stimulus or inner potential of the neurons. After that it is transformed by an activation function finto output value 0, that is computed as it is shown in equations (see Figure 03):
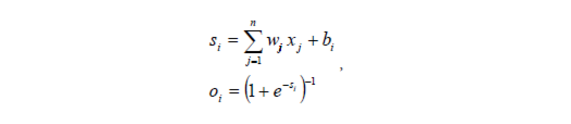

Figure 03
Activation functions
Most units in neural network transform their net inputs by using a scalar-to-scalar function called an activation function, yielding a value called the units activation. Except possibly for output units, the activation value is fed to one or more other units. Activation functions with a bounded range are often called squashing functions. Some of the most commonly used activation functions are the following (Fausett 1994).

Graphs of these activation functions are shown in Figure 04.
 Figure 04
Figure 04


Network topologies
Network topologies focus on the pattern of connections between the units and the propagation of data. The basic models are the following:
- Feed-forward networks (Figure 05), where the data flow from input to output units is strictly feed-forward. The data processing can extend over multiple (layers of) units, but no feedback connections are present, that is, connections extending from outputs of units to inputs of units in the same layer or previous layers.
- Recurrent networks (Figure 06) contain feedback connections. Contrary to feed-forward networks, the dynamical properties of the network are important. In some cases, the activation values of the units undergo a relaxation process such that the network will evolve to a stable state in which these activations do not change anymore. In other applications, the change of the activation values of the output neurons is significant such that the dynamical behavior constitutes the output of the network.
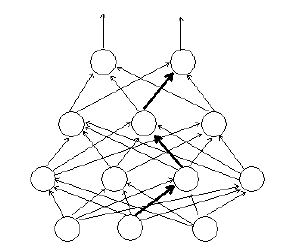
Figure 05

Figure 06
Classical examples of feed-forward networks are the Perceptron and Adaline. Examples of recurrent networks are Hopfield nets.
Training of artificial neural networks
A neural network has to be configured such that the application of a set of inputs produces (either direct or via a relaxation process) the desired set of outputs. Various methods to set the strengths of the connections exist. One way is to set the weights explicitly, using a priori knowledge. Another way is to train the neural network by feeding it teaching patterns and letting it change its weights according to some learning rule. We can categorize the learning situations in two distinct sorts. These are:
- Supervised learning or associative learning in which the network is trained by providing it with input and matching output patterns. These input-output pairs can be provided by an external teacher, or by the system which contains the network (self-supervised).
- Unsupervised learning or self-organization in which an (output) unit is trained to respond to clusters of pattern within the input. In this paradigm the system is supposed to discover statistically salient features of the input population. Unlike the supervised learning paradigm, there is no a priori set of categories into which the patterns are to be classified; rather the system must develop its own representation of the input stimuli.
Hebb rule
Both learning paradigms discussed above result in an adjustment of the weights of the connections between units, according to some modification rule. Virtually all learning rules for models of this type can be considered as a variant of the Hebbian learning rule suggested by Hebb in the classic book Organization of Behaviour (Hebb 1949). The Hebb rule determines the change in the weight connection from u, to u, by Aw, = а у 'y. where a is the learning rate and y, y, represent the activations of u, and и, respectively. Thus, if both u, and и, are activated the weight of the connection from u to и, should be increased.
Examples can be given of input/output associations which can be learned by a two-layer Hebb rule pattern associator. In fact, it can be proved that if the set of input patterns used in training are mutually orthogonal, the association can be learned by a two-layer pattern associator using Hebbian learning. However, if the set of input patterns are not mutually orthogonal, interference may occur and the network may not be able to learn associations. This limitation of Hebbian learning can be overcome by using the delta rule.
Delta rule
The delta rule (Russell 2005), also called the Least Mean Square (LMS) method, is one of the most commonly used learning rules. For a given input vector, the output vector is compared to the correct answer. If the difference is zero, no learning takes place; otherwise, the weights are adjusted to reduce this difference. The change in weight from u, to u, is given by: Aw, = a "y, e, where a is the learning rate, y, represents the activation of u, and e, is the difference between the expected output and the actual output of u. If the set of input patterns forma linearly independent set then arbitrary associations can be learned using the delta rule.
This learning rule not only moves the weight vector nearer to the ideal weight vector, it does so in the most efficient way. The delta rule implements a gradient descent by moving the weight vector from the point on the surface of the paraboloid down toward the lowest point, the vertex.
In the case of linear activation functions where the network has no hidden units, the delta rule will always find the best set of weight vectors. On the other hand, that is not the case for hidden units. The error surface is not a paraboloid and so does not have a unique minimum point. There is no such powerful rule as the delta rule for networks with hidden units. There have been a number of theories in response to this problem. These include the generalized delta rule and the unsupervised competitive learning model.
Generalizing the ideas of the delta rule, consider a hierarchical network with an input layer, an output layer and a number of hidden layers. We consider only the case where there is one hidden layer. The network is presented with input signals which produce output signals that act as input to the middle layer. Output signals from the middle layer in turn act as input to the output layer to produce the final output vector. This vector is compared to the desired output vector. Since both the output and the desired output vectors are known, we can calculate differences between both outputs and get an error of neural network. The error is backpropagated from the output layer through the middle layer to the unit which are responsible for generating that output. The delta rule can be used to adjust all the weights. More details are presented in (Fausett 1994).








No comments:
Post a Comment